I received a photo ticket in France back in 2013. Because the French system is incompetent engineered to deter innocent drivers from contesting tickets, it took more than 1.5 years to finally get my verdict. Of course I was found guilty, which is the typical result when fighting a traffic ticket. (Remember the time Deputy Melchi didn’t know the speed limit?) But in France, they have taken it to new levels of arrogance and disdain for motorists.
In short, the French government is violating their own rules for the usage of their radar units. This is causing innocent people to be ticketed, and the judicial system in France is a farce in its slowness and unwillingness to consider the idea that the prosecution might be presenting bullshit evidence.
It all comes down to what’s known as the cosine effect. Explained for laymen, an object appears to be moving faster when it moves away from a radar gun as opposed to moving across the radar beam. If an object is traveling perpendicular to the radar unit, the speed measured will always be 0 km/h. This corresponds to cos(90) = 0, which is multiplied by the actual speed to give us the measured speed. Likewise, cos(0) = 1, which explains the case that the vehicle is traveling perfectly along the radar’s line-of-sight. If you Google “cosine effect speeding ticket,” or something to that effect, you’ll find that 95% of the results state that cosine effect always favors the motorist. But not so fast!
This advice was true in the good old days when a cop manually clocked speeders and issued tickets. If a police car is parked alongside the road (or driving in the oncoming lane), the radar beam is not perfectly aligned with the car’s trajectory. In fact, to align the beam in this way would require the cop to be in the vehicle’s path, which is not really possible. This offset amounts to maybe a couple percent error in favor of the driver. Because every situation is different, there just isn’t a way to automatically correct for this. Therefore traditional speeding tickets can sometimes be a bit low. This generally has a trivial effect because the angle is very slight.
However, photo radar units are often fixed (in concrete) with respect to traffic. Even mobile units require sufficient setup such that we can consider them to be fixed as well for our purposes here. When choosing the device placement, it makes sense to use a rather steep angle to traffic, in order to clock and photograph only a single vehicle. This will lead to a severe cosine effect. If I’m a software engineer (as I sometimes am, in fact) developing a new photo radar system, I know this angle between the radar beam and traffic. This means that I can hard-code a correction percentage. This way even though my raw measurements will be low, the number printed on the ticket will be correct. And this is precisely what has been done. The certificate for the Mesta 210C (French), a very common photo radar device in France, specifically states on page 2 that the unit must be positioned such that the radar beam is at a 25-degree angle to the trajectory of traffic. This is a suitable assumption for most tickets, but there are two exceptions:
- Apparently there is a common problem with mobile devices being incorrectly set up by the police. This is likely accidental in most cases, as the average cop probably doesn’t know the trigonometry well enough to understand the effect of an error or if that error will favor the government or the driver. Additionally, the police officer probably doesn’t have much personal incentive to bias the readings.
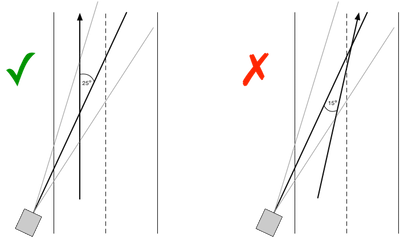
- If a car is changing lanes toward the camera, the angle will be greater than 25 degrees (as pictured below) and thus the recorded speed will be low (in favor of the driver). If a car is changing lanes away from the camera, the angle will be less than 25 degrees and thus the recorded speed will be high (in favor of the government). Note the cynicism required to assume that something that is anti-people is pro-government.
Normally any error due to cosine effect will be relatively slight. But in my case, cosine effect alone is sufficient to prove that my ticket was issued in error. Additionally, the Mesta 210C must have other factors leading to additional error at incorrect angles, as shown in the table at the bottom of page 2 in this study conducted by the government in Metz (French). Note that the error in recorded speed is quite severe for even a one- or two-degree error in radar placement.
In my case, we can do the following calculations to find the error purely due to cosine effect. First we can calculate the angle of the vehicle to the camera line-of-sight. The best way to do this is using a wheel. We can always be certain that wheels have the same circular shape. The distortion of this shape tells us the angle with respect to the camera. The following image shows a rough calculation, using the inverse sine of the width-to-height ratio.
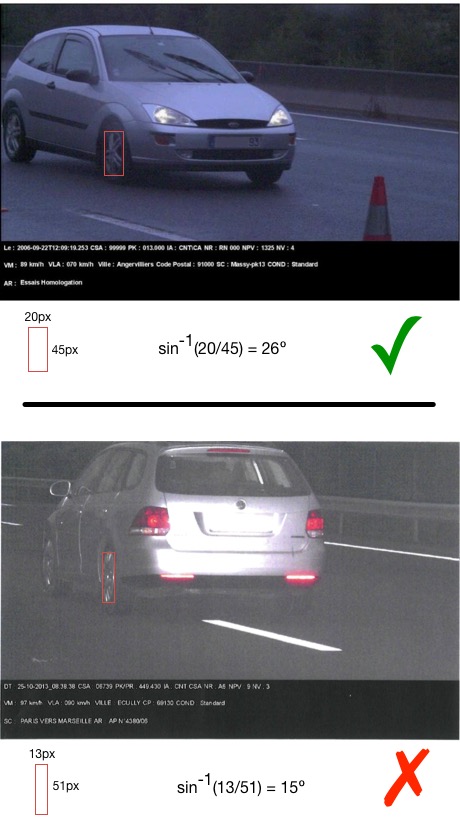
The top photograph is from another certification document. Disregard the direction of travel, as the system works the same either way. We can assume that this photo is correct, but note that my calculations show 26 degrees. This is probably because using a pixel ruler to measure a wheel is not extremely precise. My calculations could easily be off by a degree. The bottom photograph is from my citation. My calculations indicate that the car is traveling at a 15-degree angle relative to the camera’s line-of-sight. This difference is so large we can see it with the naked eye. It could also be off by a degree or so in either direction, but it is very safe to say that this angle is nowhere near the 25 degrees mandated by law. Additionally, to change lanes at a 10-degree angle, as depicted in this photo, is very unlikely given the realities of vehicle dynamics.
So now that I’ve shown the angle to be incorrect, we know that the camera was used in violation of French law and that the ticket never should have been issued. However, for completeness, we can calculate the actual error due to the cosine effect. In an optimal situation, the camera is at a 25-degree angle, so if a vehicle is traveling at 90 km/h then the measured speed will be 90 × cos(25) ≈ 82 km/h. The system can correct for this by dividing the measured speed by cos(25) to get the actual speed. In my case, assume that the vehicle was only traveling at a 15-degree angle to the camera. If my car had been traveling 90 km/h then the measured speed would be 90 × cos(15) ≈ 87 km/h. The system doesn’t know the angle though, so it still divides its measurement by cos(25), which produces a result of approximately 96 km/h. Note that this is the minimum error, because the Metz report indicates that this model is susceptible to greater error. It is likely that my car was traveling far below the speed limit when it was clocked.
France is writing tickets and prosecuting for this! This guy had a similar problem, though he is French so he managed to win his case in court (though they still didn’t give his money back). My reading of the relevant documents leads me to believe that it is actually a punishable crime to use a radar device in a manner not conforming to the certification. If a criminal element exists in prosecutors’ offices or among speed camera operators, we should demand charges. If we did so, it would only be fair if we stripped them of all of their due process rights, eliminated the presumption of innocence, and charged them a fine up front before giving them a court date 1.5 years in the future.
[…] Update (July 15, 2015): I’ve written a detailed description of the math and science behind these problems at https://wheresthecop.com/cosine-effect-and-invalid-photo-citations/. […]